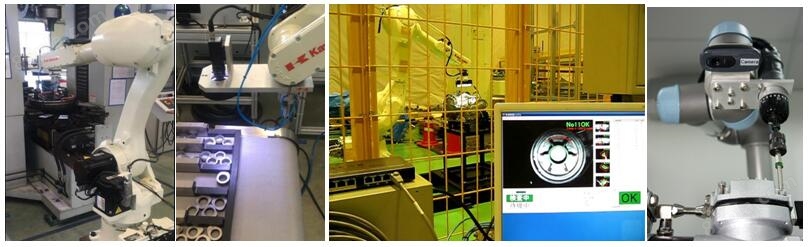
工作原理:利用高清晰攝像頭實現對工件或工件上某一點的準確位置、檢測目標存在性、裝配質量以及產品缺陷進行判斷,機器人收到信號后,機器人裝上為工件定制的專用抓手抓取工件(或抓取配置設備對工件某點作業),機器人收到完成信號后,繼續進行下一步工作。
機器人視覺檢測應用特點:
快速判斷產品質量,避免人工檢測誤檢或漏檢
保證產品質量,提高生產效率
改善工人勞動環境,大幅降低工人勞動強度,可在有害環境下工作
降低了對工人操作技術的要求
縮短了因產品變化帶來的設備變更周期,減少投資
使生產流水線更加簡單,易于維護
系統結構簡單,能在各種機械場合進行應用,滿足高效能、低能耗的生產要求